自动驾驶技术作为现代交通系统的核心驱动力,正经历着前所未有的变革。2024年,随着法规、技术与市场需求的同步演进,自动驾驶域控制器(Domain Controller)作为实现高级别自动驾驶的“大脑”,其发展路径与内涵已愈发清晰。本文将梳理自动驾驶域控制器的来龙去脉,并聚焦于L3级自动驾驶落地、大模型赋能以及“舱驾一体”融合趋势,同时探讨如何借鉴生物质能资源数据库信息系统的思维,为自动驾驶的数据生态与资源管理提供新视角。
一、自动驾驶域控制器的演进:从分布式到集中式
自动驾驶域控制器的概念源于汽车电子电气架构(EEA)的演进。传统分布式架构中,各个功能由独立的电子控制单元(ECU)实现,导致系统复杂、成本高昂且难以协同。为应对高级别自动驾驶对海量数据处理与实时决策的需求,域控制器应运而生。它将原本分散的ECU功能整合到少数几个高性能计算平台上,实现了计算资源的集中与高效利用。
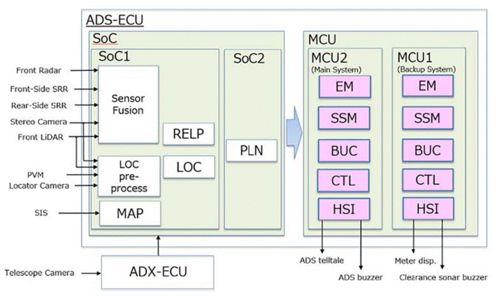
2024年,域控制器已进入“中央计算+区域控制”的新阶段。硬件上,搭载多核SoC(如英伟达Orin、高通骁龙Ride等)的域控制器成为主流,支持并行处理摄像头、雷达、激光雷达等多传感器数据。软件层面,基于AUTOSAR Adaptive等标准的中间件,实现了软硬件解耦,为功能迭代与升级提供了灵活性。
二、L3级自动驾驶落地:域控制器的关键角色
2024年被视为L3级自动驾驶商业化落地的关键年份。L3级(有条件自动驾驶)要求车辆在特定场景下能完全接管驾驶任务,这对域控制器的实时性、可靠性与安全性提出了极高要求。
域控制器在此过程中扮演着“决策中枢”的角色:它需要融合感知数据,通过规控算法生成驾驶策略,并确保系统在遇到无法处理的场景时,能安全地将控制权交还给驾驶员。2024年的域控制器方案普遍集成了冗余设计(如双芯片备份)与功能安全机制(符合ISO 26262 ASIL-D等级),以应对L3级的安全挑战。
三、大模型赋能:从感知到认知的飞跃
大模型(如Transformer、多模态大语言模型)的兴起,正深刻改变自动驾驶域控制器的能力边界。传统基于规则与深度学习的算法虽在感知层面取得进展,但在复杂场景的理解与预测上仍存局限。2024年,大模型开始被集成到域控制器中,赋能更高级别的环境认知与决策。
例如,通过大模型对交通参与者行为进行长时序预测,或理解模糊的驾驶指令(如“找个人少的地方停车”)。这要求域控制器具备更强的算力与内存带宽,以支持大模型的部署与推理。边缘计算与云端协同成为趋势,域控制器作为边缘节点,可实时处理关键任务,同时与云端大模型交互获取知识增强。
四、“舱驾一体”融合:用户体验与效率的双重提升
“舱驾一体”已成为2024年域控制器发展的显着趋势。传统座舱域与自动驾驶域相互独立,导致硬件资源浪费与交互割裂。通过整合两者功能到单一域控制器(或跨域融合平台),可实现算力共享、数据互通与成本优化。
例如,在L3级自动驾驶激活时,座舱域可同步调整显示屏内容、座椅姿态等,提供沉浸式体验;驾驶员状态监控系统(DMS)的数据也可用于评估接管准备度,提升安全性。“舱驾一体”域控制器正推动汽车向“移动智能空间”转型。
五、启示与展望:借鉴生物质能资源数据库信息系统的思维
自动驾驶域控制器的发展,本质上是对数据、算力与算法资源的整合与优化。这一点与生物质能资源数据库信息系统(一个用于收集、分析与管理生物质能资源数据的平台)有异曲同工之妙。后者通过系统化采集资源分布、产量、转化效率等数据,为能源规划与利用提供决策支持。
对自动驾驶而言,我们可借鉴其“资源数据库”思维:构建覆盖车辆全生命周期的数据生态系统。域控制器作为数据生成与处理的关键节点,可标准化输出车辆运行、环境感知、驾驶行为等数据,并上传至云端数据库。经过匿名化与脱敏处理后,这些数据可用于训练与优化自动驾驶算法(尤其是大模型),形成“数据驱动迭代”的闭环。类似生物质能数据库对资源可持续性的关注,自动驾驶数据生态也需强调数据安全、隐私保护与伦理规范。
自动驾驶域控制器将继续向更高集成度、更强AI能力与更开放平台演进。随着L3级普及与L4级探索,以及大模型与舱驾融合的深化,域控制器将成为定义汽车智能的核心。而构建一个类似生物质能资源数据库那样高效、安全的数据管理系统,将是释放自动驾驶全部潜力的关键基石。2024年,我们正站在一个技术聚合与产业重塑的拐点,自动驾驶域控制器的故事,才刚刚进入精彩篇章。